- 2024.08: Our paper, “IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies”, is accepted by CoRL!
- 2023.09.22: Our paper, A General Theory of Correct, Incorrect, and Extrinsic Equivariance, is accepted by NeurIPS 2023!
- 2022.11.23: Our work, SEIL: Simulation-augmented Equivariant Imitation Learning, will be presented in CoRL 2022 Workshop on Sim-to-Real Robot Learning!
- 2022.09.15: Our paper, On-Robot Learning With Equivariant Models, is accepted by CoRL 2022!
- 2022.07.15: Our paper, BulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework, is accepted by ISRR 2022!
About
👋 Hi, I’m Mingxi Jia. I am a Ph.D. student in Computer Science at Brown University, advised by Professor Stefanie Tellex. I’m interested in building general-purpose learning-based robot manipulation algorithms. Before Brown, I got my master’s degree in Robotics (Computer Science concentration) from Northeastern University, Boston, where I was fortunate to work with Professor Robert Platt. I received my Bachelor’s degree (in Mechanical Design, Manufacturing, and its Automation) at Beijing University of Chemical Technology (BUCT). Please feel free to send me an email via mingxi_jia@brown.edu if you have any questions!
📢 News
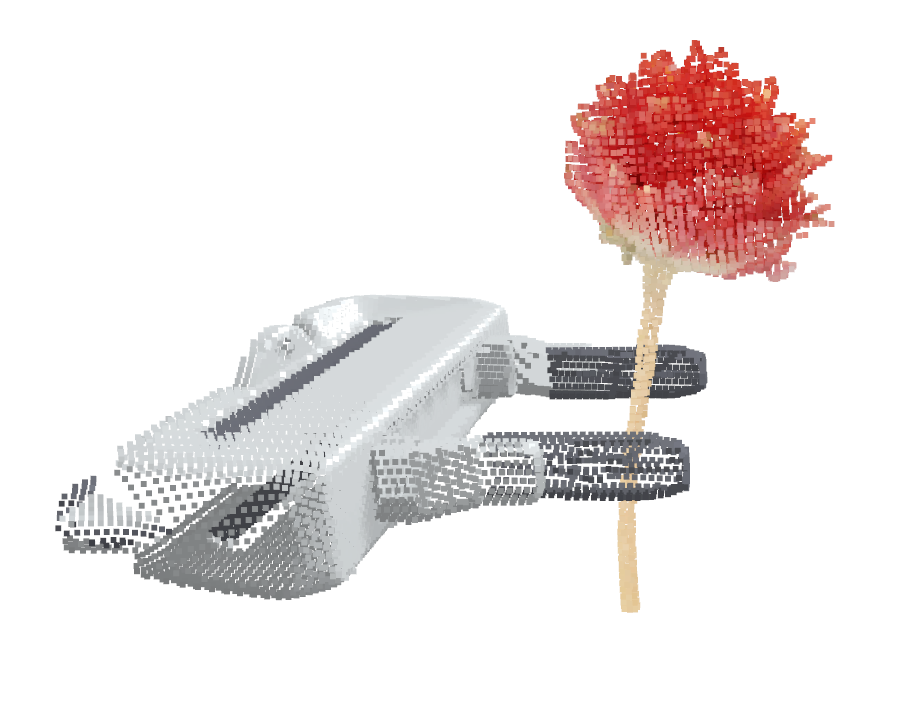
- 2025.06: Our paper, Learning Efficient and Robust Language-conditioned Manipulation using Textual-Visual Relevancy and Equivariant Language Mapping, is accepted by RAL!
- 2023.01.16: Our paper, SEIL: Simulation-augmented Equivariant Imitation Learning, is accepted by ICRA 2023!
Click to Expand
📝 Publications
RAL 2025
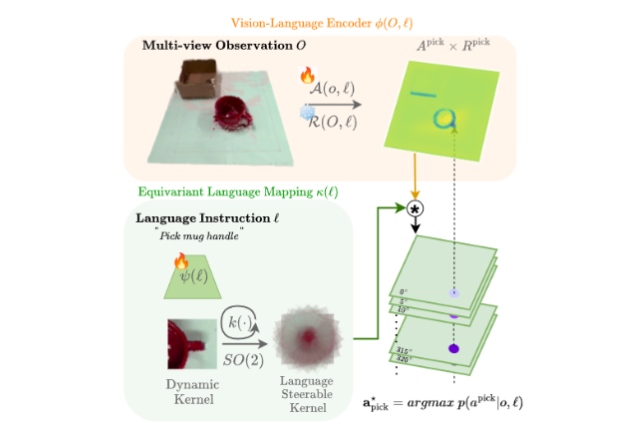
Learning Efficient and Robust Language-conditioned Manipulation using Textual-Visual Relevancy and Equivariant Language Mapping
Mingxi Jia\(^*\), Haojie Huang\(^*\), Zhewen Zhang, Chenghao Wang, Linfeng Zhao, Dian Wang, Jason Xinyu Liu, Robin Walters, Robert Platt, Stefanie Tellex
RAL 2025
RSS 2025
V-HOP: Visuo-Haptic 6D Object Pose Tracking
Hongyu Li, Mingxi Jia, Tuluhan Akbulut, Yu Xiang, George Konidaris, Srinath Sridhar
RSS 2025
RSS 2025
Optimal Interactive Learning on the Job via Facility Location Planning
Shivam Vats, Michelle Zhao, Patrick Callaghan, Mingxi Jia, Maxim Likhachev, Oliver Kroemer, George Konidaris
RSS 2025
CoRL 2024
IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies
Haojie Huang, Karl Schmeckpeper*, Dian Wang*, Ondrej Biza*, Yaoyao Qian, Haotian Liu, Mingxi Jia, Robert Platt, Robin Walters
CoRL 2024
NeurIPS 2023
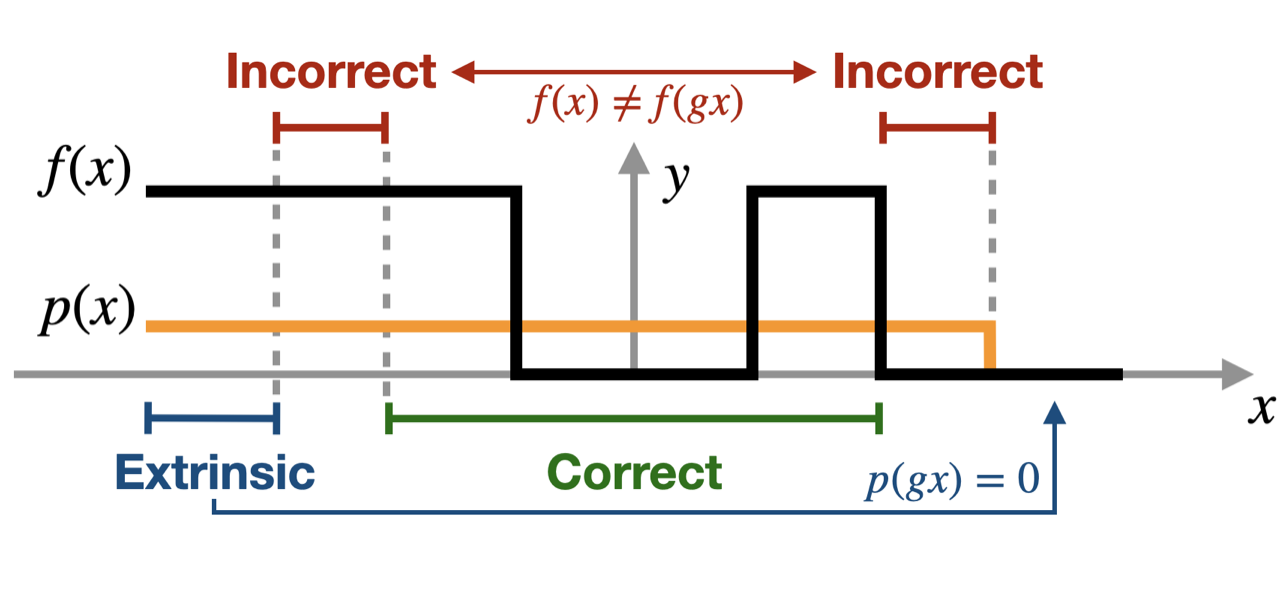
A General Theory of Correct, Incorrect, and Extrinsic Equivariance
Dian Wang, Xupeng Zhu, Jung Yeon Park, Mingxi Jia, Guanang Su, Robert Platt, Robin Walters
NeurIPS 2023
ICRA 2023
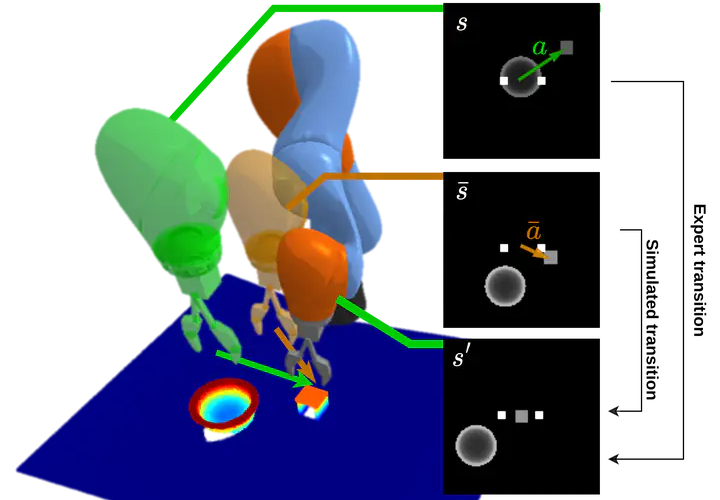
SEIL: Simulation-augmented Equivariant Imitation Learning
Mingxi Jia\(^*\), Dian Wang\(^*\), Guanang Su, David Klee, Xupeng Zhu, Robin Walters, Robert Platt
ICRA 2023
CoRL 2022
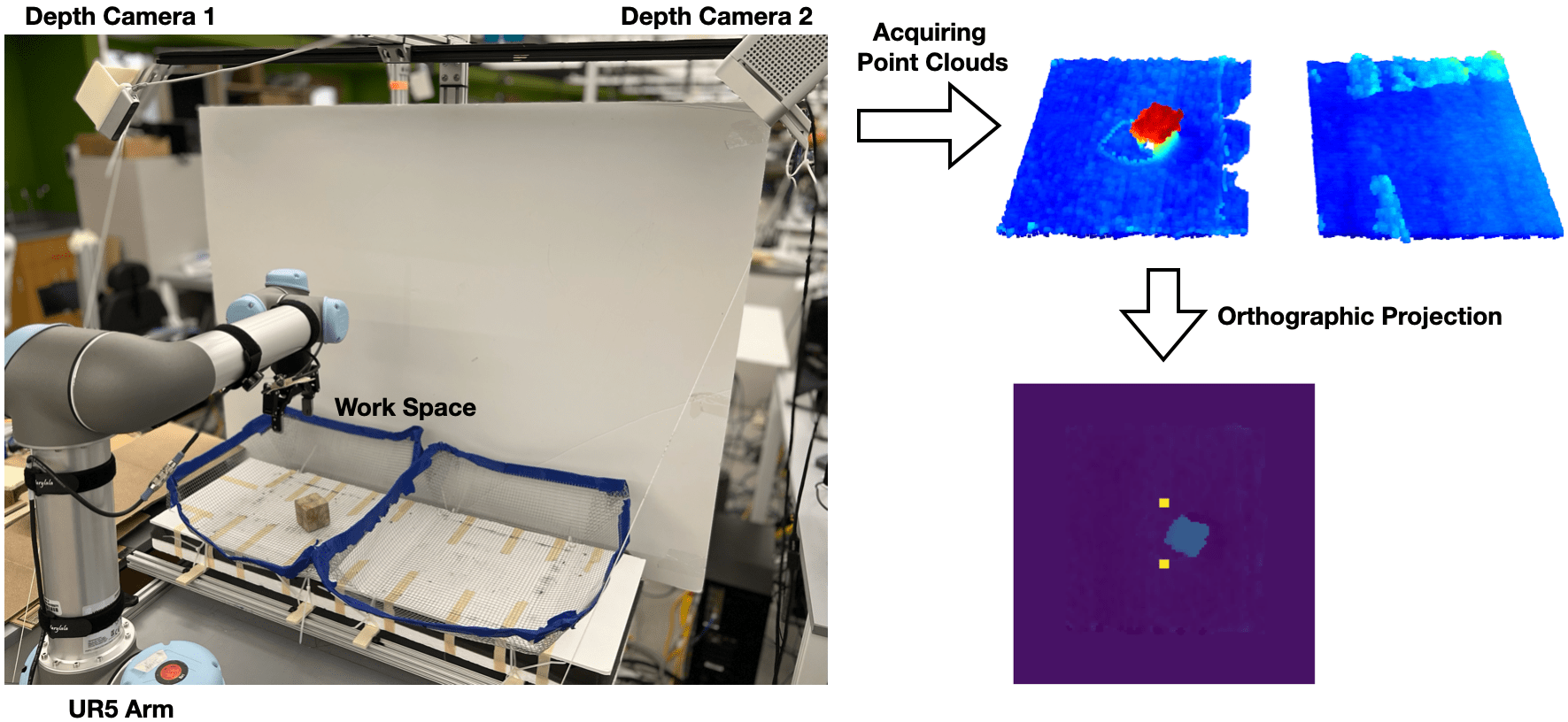
On-Robot Learning With Equivariant Models
Dian Wang, Mingxi Jia, Xupeng Zhu, Robin Walters, Robert Platt
CoRL 2022
ISRR 2022
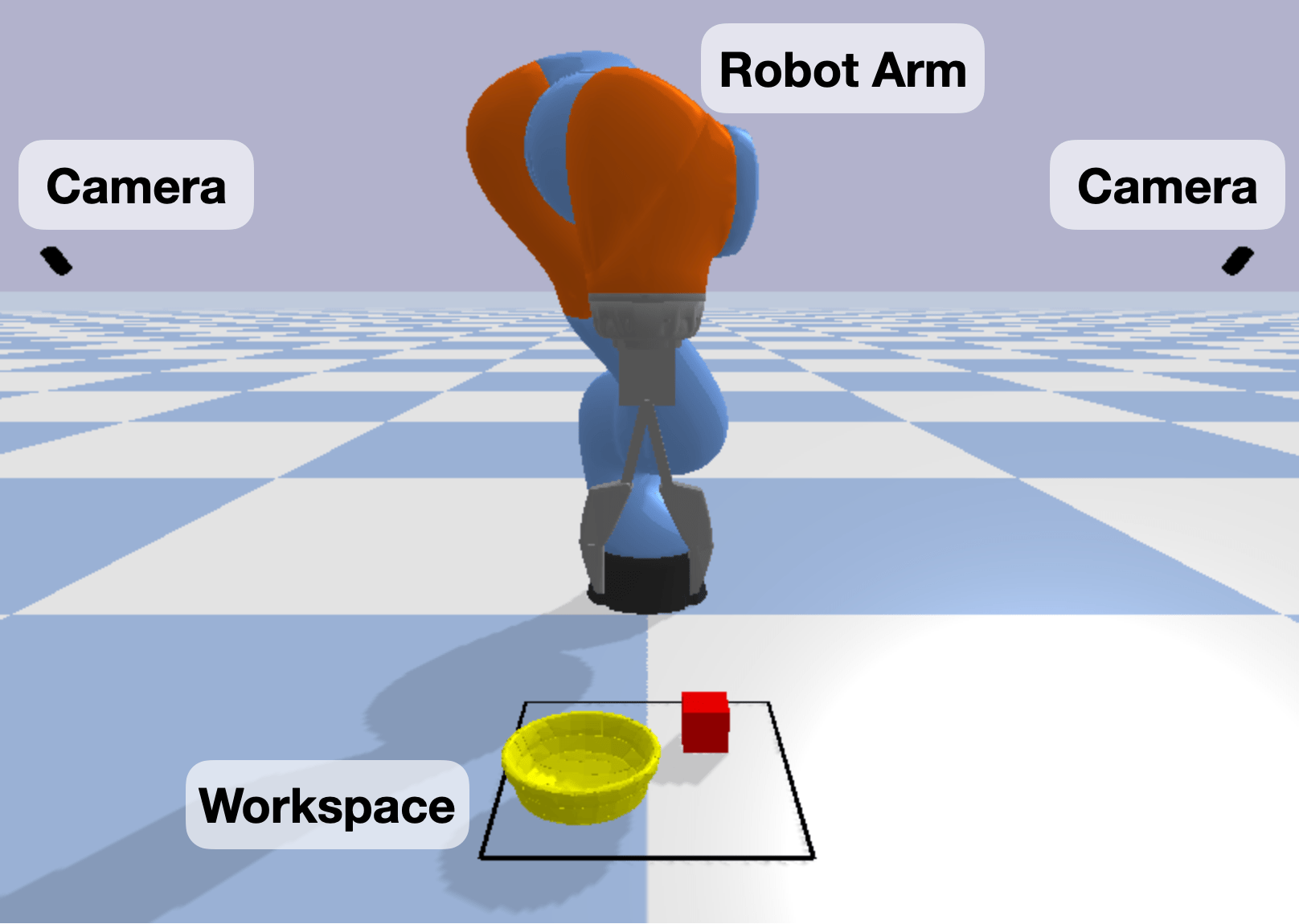
BulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework
Dian Wang*, Colin Kohler*, Xupeng Zhu, Mingxi Jia, Robert Platt
ISRR 2022
📖 Educations
- 2023.09 - now, Ph.D. in Computer Science, Brown University, Providence.
- 2021.09 - 2023.06, M.S. in Robotics (CS concentration), Northeastern University, Boston.
- 2016.09 - 2020.06, B.Eng. in Mechanical Design, Manufacturing, and its Automation, Beijing University of Chemical Technology (BUCT).